星河问途(苏州)智能科技有限公司
星星河问途(苏州)智能科技有限公司,是一家立志打造全球领先L4级道路移动机器人的科创企业,以“让机器驾驭真实物理世界,让人类创造更高级文明”为核心使命。公司业务覆盖多元L4级道路移动机器人产品矩阵,包含自研智驾系统、无人物流车、无人清扫车、无人配送车等核心品类。依托全系列无人化产品,公司正携手战略合作伙伴,共建未来城市出行、物流及终端配送的全域运力生态网络。
星河问途核心团队源自国内自动驾驶第一梯队,拥有从算法、系统到产品的全栈技术能力,以及规模化量产的实战经验,在自动驾驶算法研发、系统解决方案搭建、末端自动驾驶车辆开发等领域具备核心技术优势。公司2025年成立之初即完成数千万元天使轮融资,并成功入选「2025年中国AIEV产业最具投资价值企业TOP10」。
SEWE Advanced Autonomous Brain智驾系统
完成单位:星河问途(苏州)智能科技有限公司
完成人:孙晓龙、卢江虎
项目摘要
申报人长期深耕“人工智能+自动驾驶”这一前沿交叉领域,持续围绕高阶智能辅助驾驶核心技术开展系统性创新,主导完成了多项从0到1的突破性工作,包括研发业内领先的BEV感知算法、VLM/VLA大模型等,成功助力多家主机厂的高阶智能辅助驾驶系统进入行业第一梯队。基于长期技术积累与产业实践,申报人进一步提出并构建了SEWE Advanced Autonomous Brain技术方案,形成了面向未来高阶智能辅助驾驶的系统级技术范式。
该方案以智驾系统为核心,创新性打通智能座舱与智能底盘,形成由三大系统协同组成的完整闭环架构,为将汽车打造为未来出行机器人提供了关键的系统级支撑。与此同时,依托AI大模型底层能力的通用性,SEWE Advanced Autonomous Brain不仅适用于汽车领域,也具备向具身智能方向进一步泛化的潜力。围绕该系统,申报人还引入云端世界模型、强化学习以及多智能体引擎,将高价值数据自动挖掘、自动化数据标注、融合检索增强生成等能力接入数据闭环工作流,显著提升系统自我进化效率。
在产业化落地层面,申报人作为星河问途总裁,敏锐把握无人物流车市场机遇,聚焦行业普遍存在的高精地图依赖强、只能固定线路运行、后台运营人员投入高等关键痛点,创新性提出“无图方案+SEWE智驾系统”的技术组合,并率先打造全球首款L4级真无图自动驾驶无人物流车。该方案有效降低部署和运营成本,提升车辆调度灵活性和场景泛化能力,为无人物流车行业实现规模化、低成本和高效率运营提供了可行路径,具有显著的技术先进性与产业引领价值。
一、项目背景
当前,人工智能与自动驾驶技术正加速融合演进,推动汽车由传统交通工具向具备感知、理解、决策、执行能力的智能体持续升级。尤其在高阶智能辅助驾驶发展过程中,行业竞争已逐步从单点算法能力比拼,迈向多系统协同、端到端智能化以及持续自我进化能力的综合竞争。谁能够率先建立起以大模型为基础、贯通感知理解、任务规划、轨迹决策、车辆控制和数据闭环的系统能力,谁就更有可能在下一阶段技术跃迁中占据领先位置。
申报人长期聚焦“人工智能+自动驾驶”这一前沿交叉领域,在BEV感知算法、VLM/VLA大模型等关键方向上持续投入并取得突破,形成了较强的技术积累和产业落地能力。基于这些积累,申报人并未停留于单一模块优化,而是进一步从系统架构层面对未来高阶智能辅助驾驶进行重新思考:未来真正具备竞争力的智能驾驶系统,不应只是孤立的驾驶功能集合,而应成为连接座舱交互、环境理解、驾驶决策与底盘执行的统一智能中枢。
与此同时,在无人物流车这一快速发展的新兴场景中,行业虽然需求旺盛,但大规模商业化仍面临现实障碍。当前主流方案普遍存在对高精地图依赖度高、运输路线固定、后台接管人力投入大等问题,导致前期路线调试成本高、后期运营成本重、不同场景复制速度慢,行业整体陷入“难规模、难降本、难泛化”的发展瓶颈。申报人敏锐洞察到这一痛点,提出以更先进的乘用车级自动驾驶技术能力反向赋能无人物流车行业,探索从技术到运营的一体化突破路径。
二、项目技术方案
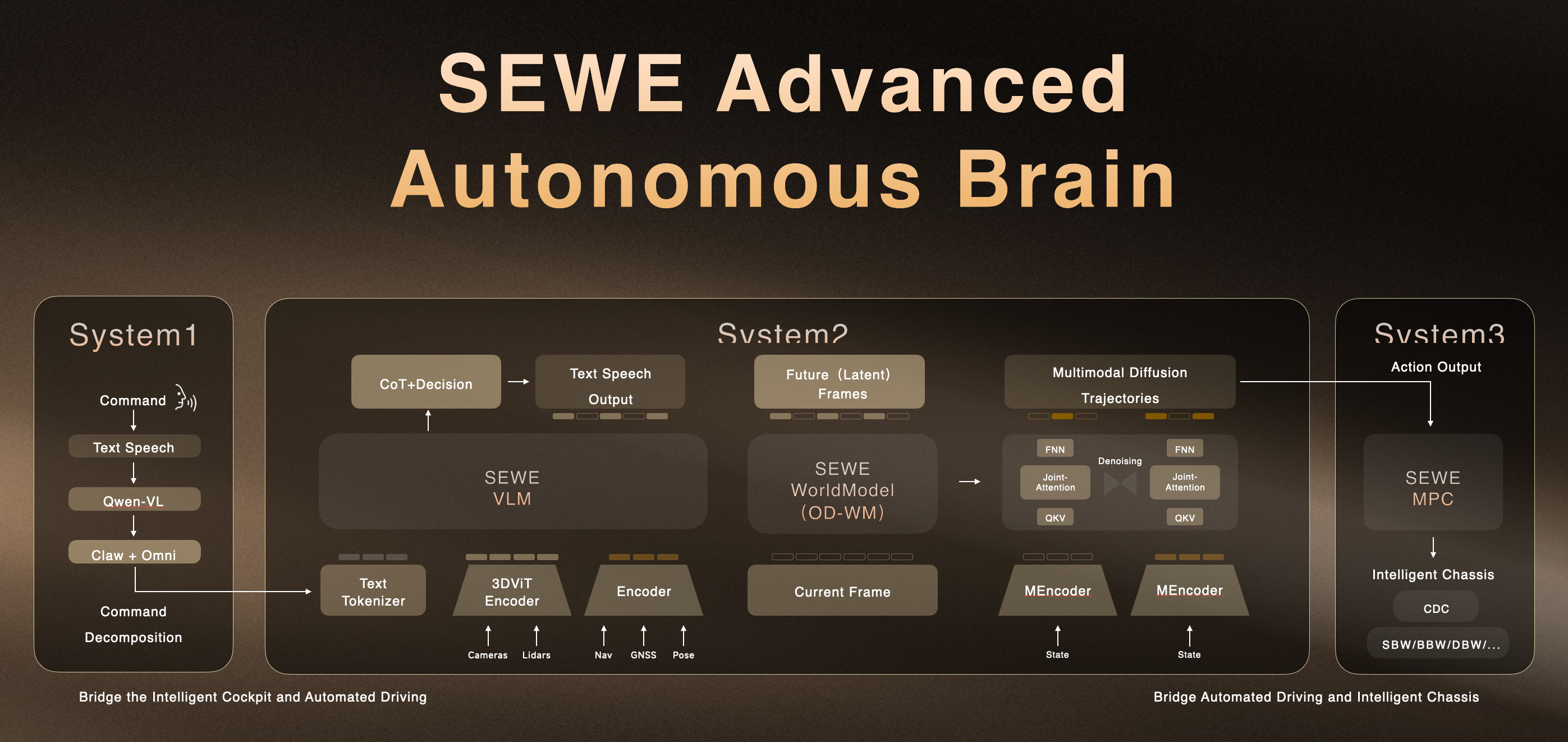
本项目核心技术成果命名为SEWE Advanced Autonomous Brain。该方案面向高阶智能辅助驾驶场景,创新性构建了由三大系统组成的整体技术范式,以智驾系统为核心,向前连接智能座舱,向后打通智能底盘,形成完整的系统级架构支撑。

(一)System 1:面向座舱交互的任务理解系统
System 1主要基于多模态大语言模型构建,负责精准识别用户在智能座舱中的语音等交互指令,并将其进一步拆解为智驾系统可接收、可处理、可执行的具体任务。该系统的关键意义在于,它不再把座舱交互与驾驶执行割裂开来,而是使车辆能够将用户意图更自然地传递到驾驶决策链条之中,从而增强人车交互的智能化水平。这一能力为未来汽车由“被动响应工具”向“主动理解型出行机器人”演进奠定了重要基础。
(二)System 2:以大模型为核心的智驾决策系统
System 2是智驾系统的核心,集成了VLM大模型、端侧世界模型、多模态扩散轨迹与控制输出等关键能力,并融合思维链(CoT)等技术,使整体智驾系统的推理与决策过程实现全程可视化。
在这一系统中,VLM大模型承担对外部环境与任务语义的综合理解能力,端侧世界模型负责对驾驶环境进行建模和演化预测,多模态扩散轨迹与控制输出则直接面向驾驶行为生成。通过将这些能力整合到统一架构中,System 2不仅提升了系统面对复杂场景时的理解与决策能力,也使自动驾驶过程具备更强的可解释性和可视化特征。尤其是融合CoT技术后,智驾系统的推理过程不再是传统意义上的“黑盒式输出”,而是能够在一定程度上展现从理解到判断再到行动的逻辑链条,这对于高阶智能辅助驾驶系统的工程落地与持续优化具有重要意义。
(三)System 3:面向车辆执行的智能控制系统
System 3主要面向车辆控制层,率先采用MPC(模型预测控制)算法,通过大模型预测未来1—3秒的车辆运动状态,在车辆动力学约束下实现更优控制。该系统能够显著提升车辆在高速巡航、快速过弯等场景下的稳定性与控制表现,从而更充分地释放智能底盘的潜力。
这一系统的价值在于,它将高层智能决策与底层车辆执行进行了有效衔接。只有当上层模型输出能够在真实车辆动力学约束下被稳定、精确地执行,整个高阶智能辅助驾驶系统才具备真正的落地能力。System 3正是在这一层面上,为SEWE Advanced Autonomous Brain提供了重要支撑。
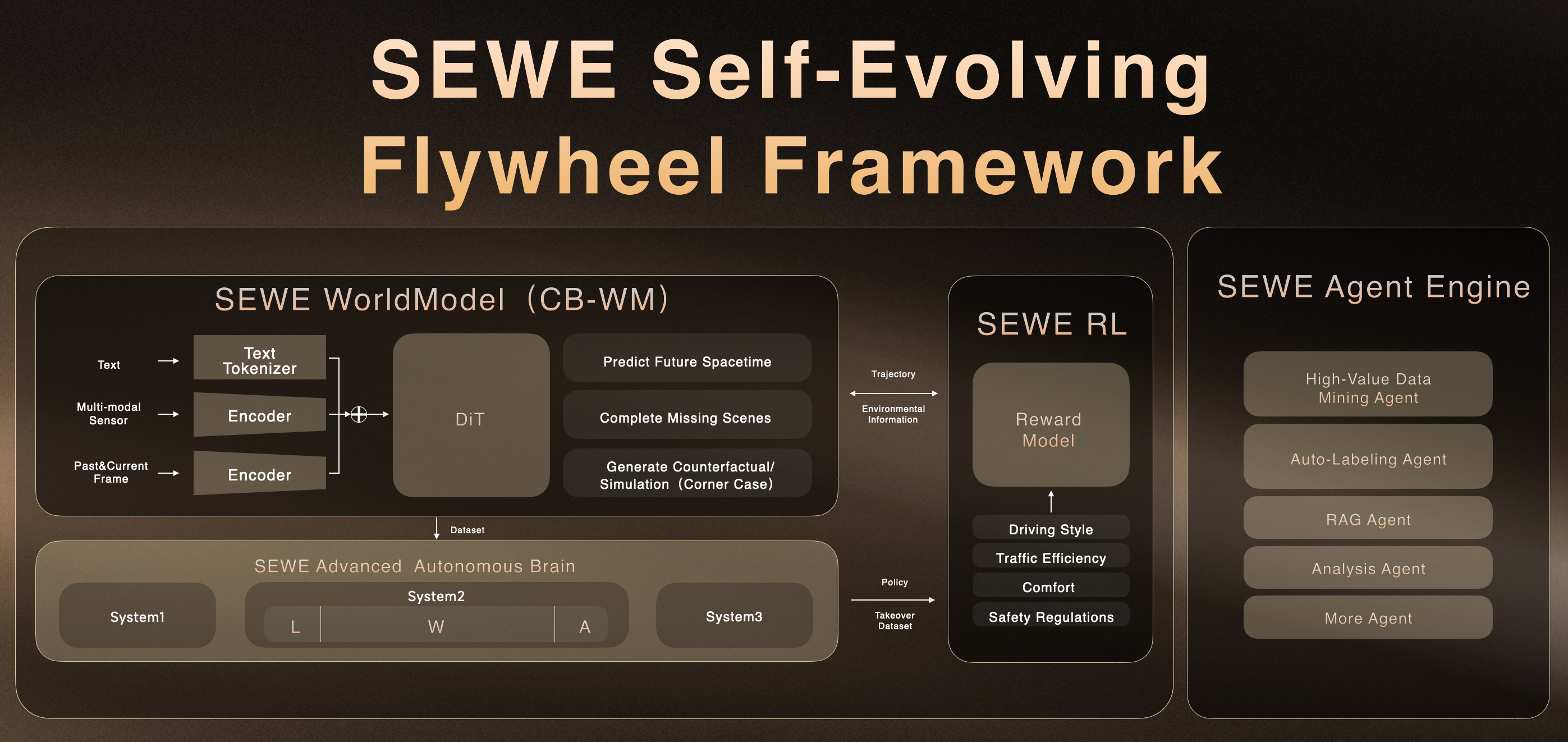
(四)云端进化与多智能体数据闭环
在三大系统之外,申报人进一步引入了云端世界模型与强化学习,使其具备自我进化能力,并创新性地搭配了系列人工智能体引擎,包括高价值数据自动挖掘、自动化数据标注、融合检索增强生成等。通过多智能体融合进数据闭环工作流,显著加速了系统的整体进化效率。
三、项目落地场景与应用效果
在实际落地方面,申报人作为星河问途的总裁,敏锐捕捉到无人物流车领域的海量市场需求,同时洞察到当前行业存在的三大痛点:对高精地图强依赖、仅支持点到点固定线路运输、后台需铺设大量运营人员随时接管。这些问题导致前期路线调试与后期运营成本飙升,形成了无人物流车行业“难规模、难降本、难泛化”的现实困境。
申报人从第一性原理出发,回归无人物流车的技术本质,率先采用“无图方案+SAAB智驾系统”的技术组合,打造了全球首款L4级真无图自动驾驶无人物流车,针对性攻克了行业三大痛点:
1.针对高精地图强依赖导致地图采集成本高企:率先在无人物流行业中采用技术领先的无图智驾方案,实现“有路就能跑”,无需投入大量人力与时间进行高精地图的采集与维护,极大地降低了高精地图采图建图成本,大幅提升部署效率,实现交付即可用。
2.针对仅支持固定路线运输、运营负荷低导致ROI不高:采用业内领先的SAAB智驾系统,支持任意路线及场景的自动驾驶能力泛化,同时结合运营Claw APP,可远程在线调度车辆,实现灵活的串点运输,显著提升每日运营频次,从而摊薄单车成本。
3.针对后台运营人员数量随规模线性增长、运营成本过高:SAAB系统能够自主识别交警与工作人员,并接受其交通指挥指令,有效降低途中临时接管频次;同时可根据实时路况自主选择路线并绕行。针对少数罕见的长尾场景(Corner case),系统可通过世界模型与强化学习进行更新,并远程OTA升级,从而大幅降低人为接管需求。
申报人创新地将更先进的乘用车级自动驾驶技术引入当前快速发展的无人物流车行业,不仅有效解决了行业现有痛点;更通过引入大量AI与智能体(Agent)技术,显著提升了技术迭代进化速度与车辆调度效率,将引领无人物流车行业从技术到运营迈向更前沿的视野。
四、总结
综上,申报人围绕“人工智能+自动驾驶”持续进行前沿技术创新,已在BEV感知算法、VLM/VLA大模型等关键方向上取得突出成果,并进一步形成了SEWE Advanced Autonomous Brain这一具有系统创新意义的高阶智能辅助驾驶技术方案。该方案以三大系统为核心,协同连接智能座舱、智驾系统与智能底盘,同时结合云端世界模型、强化学习和多智能体数据闭环,实现了系统能力构建与持续自我进化的有机统一。
在产业化落地方面,申报人立足无人物流车行业实际需求,率先提出并实践“无图方案+SEWE智驾系统”,打造全球首款L4级真无图自动驾驶无人物流车,针对性解决了行业长期存在的高精地图依赖、固定路线运行和高人工运营成本等问题,展现出较强的技术先进性、应用价值与行业引领意义。该项目不仅代表了申报人最新技术创新成果的集中体现,也为未来自动驾驶技术向更高等级智能化演进,以及向更广泛具身智能领域拓展,提供了重要参考。