在如今,为了更好地预测机械零件的寿命,直升机行业已经开始越来越重视数字孪生技术的发展。因为可用于测量飞行期间载荷的传感器数量有限,所以为了计算机械零件承受的所有载荷,则可以进行模拟仿真以进行补充。对于仿真计算来说,因为直升机动力学系统的复杂性,所以使用多体动力学的形式建立多个子系统的局部模型是有效的方法。本文将介绍某国外直升机主旋翼倾斜盘为研究对象创建数字孪生体的案例。
01、直升机动力系统数字孪生特性介绍
数字孪生是“实际物理产品的数字表示”。它将从产品中获取的一些信息作为输入数据,提供有关该产品在运行中的行为的附加信息。
在直升机工业中,数字孪生技术可以帮助我们更好地维护直升机动力系统。相对于传统的直升机结构,动态系统包括桨叶、主旋翼、主齿轮箱、液压传动、发动机、尾桨和尾齿轮箱。这些系统通过运动学连接,将动力传递给叶片,以提供飞机的推力和升力。了解这些系统的机械部件在实际使用条件下所承受的载荷,将使公司能够准确地知道部件的寿命和更换时间。
直升机在飞行状态下,对大部分机械部件运行状态的测量都会非常困难。比如,图1照片中橙色的传感器电缆数量众多,体积庞大。由于直升机旋翼的动态运动,旋转部件如变桨杆等部位,不容易安装传感器。即便安装好,飞行过程中的维护也会非常困难。
这就是为什么引入数字孪生概念,它将有助于我们从系统中某些特定部位的传感器数据,计算出其它大部分部件的实时荷载。作为构建数字孪生模型方法的一部分,使用多体动力学仿真,是因为它确实是计算机构关节处荷载和位移的方法之一。由于旋翼的研究需要能够处理大位移的情况并考虑动力学效应,因此多体的形式具有很好的适应性。
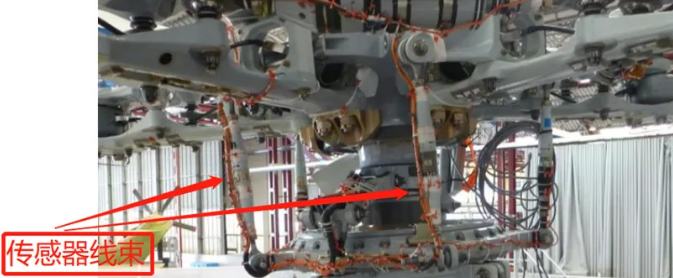
图1.用于验证的直升机主旋翼
考虑到系统的一些特性。从电机到叶片,所涉及的零件和系统非常多。我们必须将之细分为多个子系统,并初步建立相关的局部模型。下面介绍其中一个子系统,即主旋翼控制系统。
02、直升机动力系统多体仿真研究进展
直升机动力学系统中某些结构或节点的非线性行为会严重影响多体模型的计算结果,例如,带有弹性部件的节点通常用于主旋翼顶部作为超前-滞后阻尼器。它们的刚度和阻尼特性是非线性的,取决于位移和速度。另外如一些结构部件,如叶片,具有极大的柔性,它们所承受的载荷会与其运动中的形变会产生耦合。所以为了从多体模型中得到正确的结果,则必须考虑这些特性。
行业专家在对比了大量仿真结果和测试测量结果之间的差异后,提出了一个新的建模框架以改进动态直升机系统的一些负载预测。该框架使用有限元方法的非线性力学求解器搭建,并使用一种创建超单元的方法去对柔体建模,如叶片的截面。该方法通过模拟一个装有叶片并在悬停状态下旋转的主旋翼进行了验证。图2可以观察到叶片的旋转位移,而且还确定了主旋翼载荷的分布,并与台架试验结果进行了比较。
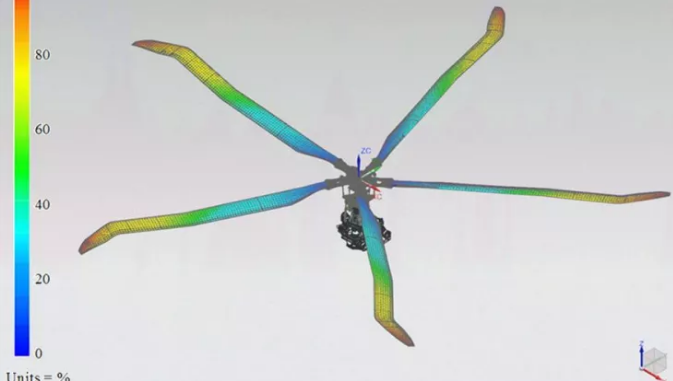
图2.基于多体仿真的叶片位移计算
03、分析倾斜盘组件的相关载荷
建立一个能够有效模拟旋翼控制系统动态行为的数字孪生模型非常困难。倾斜盘,是一个将位移从“固定坐标系”切换到“旋转坐标系”以控制叶片入射角的机构,也是数字孪生模型中最难处理的部分之一。
图3所示的系统包括液压传动装置、固定倾斜盘、主旋翼旋转倾斜盘、倾斜盘之间的滚珠轴承、旋转剪和固定剪、球面轴承和变桨杆。
固定倾斜盘的位置由液压传动杆控制。该倾斜盘被视为固定的,因为它不随主旋翼桅杆旋转。然而,它有一个给定的机动性,因为它可以沿着主齿轮箱(MGB)外壳滑动,并通过球面轴承绕垂直于桅杆的两个轴旋转。主旋翼旋转倾斜盘与变桨杆相连。转动配重与叶片相连。旋转剪允许倾斜盘绕旋翼桅杆轴旋转。滚珠轴承是两个倾斜盘之间的连接关节。
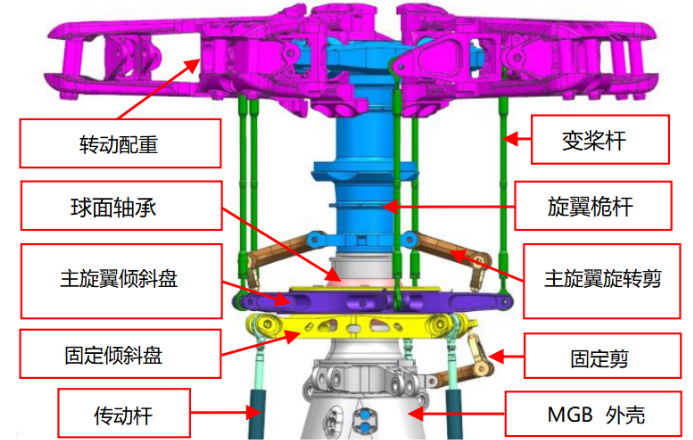
图3.主旋翼控制机构
04、利用实验数据建立仿真关系
4.1实验数据的使用
将搭建的主旋翼数字孪生体与实验台架相连。如图4所示,该台架仅由属于主旋翼控制机构的零件组成并可以设置成静态载荷或者动态载荷。
通过台架测量到的测量值可以用作数字孪生体的输入。如前文所述,变桨杆和旋转剪这两个旋转部件的载荷在飞行过程中无法测量,但现在可以借由数字孪生体仿真计算。之后可再与试验台的试验结果进行比较。
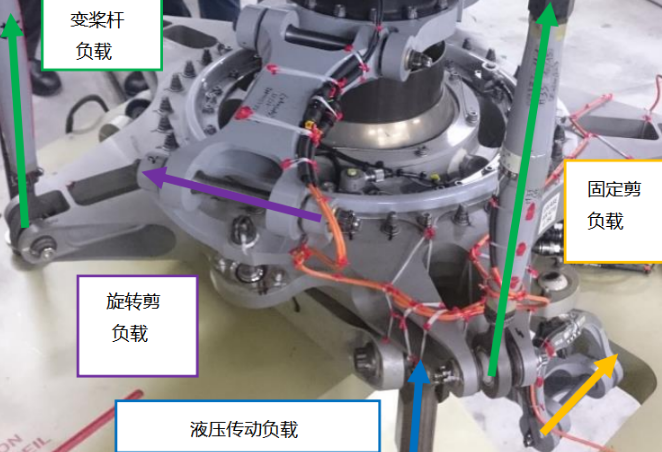
图4.主旋翼台架
4.2倾斜盘的多体仿真
对于倾斜盘的数字孪生模型来说,需要考虑的首先是倾斜盘本身的灵活性,另外还有倾斜盘之间的双排滚珠轴承(如图5所示)。两者的变形都会为主旋翼的载荷产生影响。
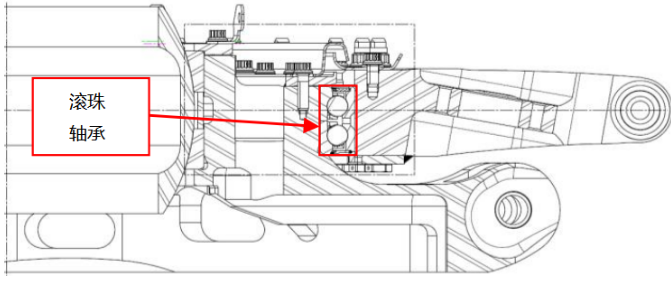
图5.倾斜盘侧面透视图
倾斜盘组件模型的完整示意图如图6所示。在这张图中,模型呈现在一个径向平面上,由以下元素组成:
-固定倾斜盘的超单元(黄色):这个超单元反映了固定倾斜盘臂的灵活性
-旋转倾斜盘的超单元(紫色):轴承外圈是这个超单元的一部分
-被称为“固定上部倾斜盘”(蓝色)的刚体:通过铰链关节与固定倾斜盘的超单元连接。
-刚性内环(绿色)与固定上部倾斜盘滑动连接。
-弹簧元件(红色)。在每个滚珠的右侧,一个弹簧连接外圈座圈的中心到内圈座圈的中心,表示滚珠和座圈之间的接触刚度。
-连接到外圈(橙色)的刚性元件,将倾斜盘超单元的节点连接到外圈座圈的中心。
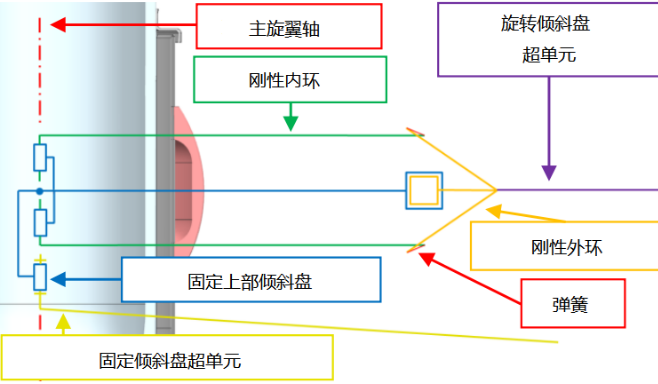
图6.倾斜盘组件模型图
图7是倾斜盘模型的全局视图。右下角蓝色框内放大了圆环中心之间的弹簧。
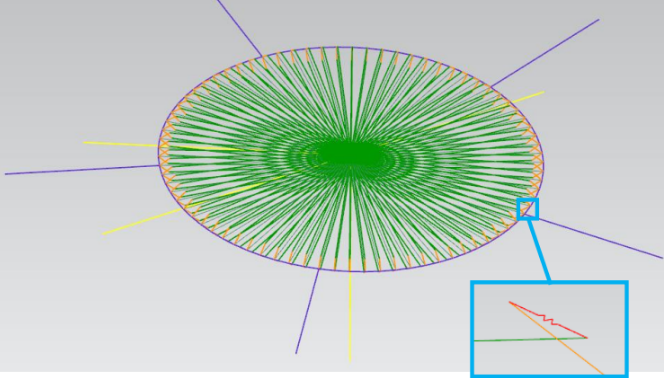
图7.倾斜盘模型全局视图
4.3结果和模型验证
图8展示了在给定的仿真时间内,数字孪生模型相关零件的位移量。
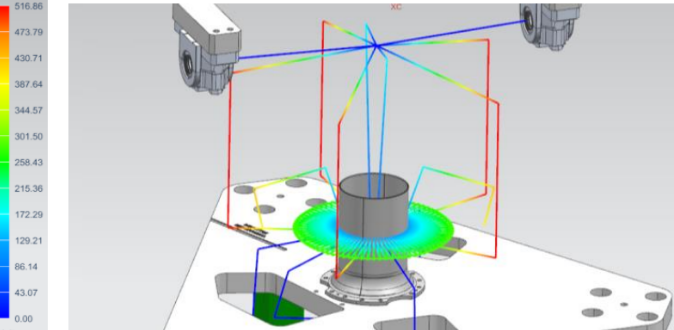
图8.主旋翼位移量
对主旋翼系统进行台架试验,并与数字孪生系统的仿真结果进行比较。图9显示了轴向变桨杆载荷的演变。仿真结果与试验结果的差距较小,验证了所选方法的有效性。
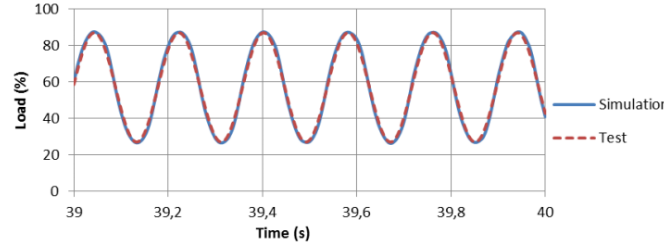
图9.台架试验中变桨杆的无量纲轴向载荷
参考文献:D.Guivarch,E.Mermoz,Y Marino,M.Sartor,2019,Creation ofhelicopter dynamic systems digital twin using multibody simulations
