双足机器人曾是科幻文学和电影的主题。在非理想地形上,早期双足机器人的形象通常是移动缓慢且笨拙的。近年来的技术进步使得它们能够在保持平衡的同时更快、更有效地移动,但是其移动或多或少还是会受到崎岖地形的阻碍。
相比之下,飞行机器人只需要在地面上空飞行即可轻松驾驭崎岖地形,但它们同样面临一些限制,如飞行过程中的高能耗和有限的负载能力。因此,将双足机器人与飞行机器人相结合或许能够有效解决这些问题。
近日,加州理工学院的研究人员就打造了这样一款机器人LEONARDO(LEgs ONboARD drOne,LEO),该机器人创造了一种新型的运动方式,兼具行走和飞行,灵活异常,且可以进行复杂的活动。
该机器人主要由三个子系统组成,分别是躯干、四个以一定角度安装在肩部的螺旋桨推进器、以及两条配有3个驱动关节的腿。LEO的重量为2.58千克,行走时整机高度为75cm。
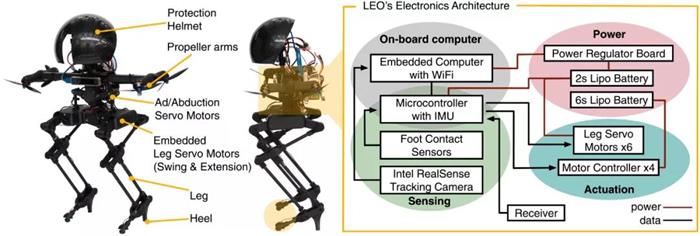
其中,控制腿运动的是集成式直流无刷电机,装在靠近腰部的位置,这样可以减少腿的惯性。脚尖部分是半球形的聚氨酯橡胶,这种材料摩擦系数很高可以防止滑倒。高跟鞋的设计也是为了尽可能减少面积和重量,同时在站立不动的时候能保持稳定。
LEO的肩部有四个对称安装的螺旋桨,用于稳定和控制自身的行走和飞行运动。选择螺旋桨的旋转轴,以在正向和逆向两个方向上生成飞行时质心(CoM)和行走时当前站立脚位置所需的滚转、俯仰和偏航力矩。

LEO的开发实际是为了一些特定的应用场景,例如高压线路检修和高架桥检测。这些任务靠人去做比较危险,而传统的双足机器人够不着,无人机悬停时面对气流扰动又不够稳定,但LEO可以很好的完成这些任务。
值得一提的是,只要提供一个能站的平面,该机器人靠双腿和螺旋桨的配合,哪怕是十分打滑平面也能保持稳定。LEO的正常行走速度为20cm/s,即0.72km/h,在行走和断续飞行同时进行时,速度会大大增加。
除了正常行走和飞行之外,LEO还会一系列高难度的动作,如滑滑板和走绳索等,未来其或许能在一些高难、高危的场景中发挥作用。
