本文来源:M. Ruba, R. O. Nemes, S. M. Ciornei, C. Martis, A. Bouscayrol, and H. Hedesiu, “Digital Twin Real-Time FPGA Implementation for Light Electric Vehicle Propulsion System Using EMR Organization,” in 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, Oct. 2019, pp. 1–6.
“ 本研究重点介绍了几种不同概念的实现对轻型电动汽车推进装置试验装置的智能分析。首先,提出了“数字孪生”的概念,它代表一个完整的测试设备的模拟副本。此外,数字孪生(DT)不再使用离线仿真环境,而是使用两个现场可编程门阵列(FPGA)编程运行,从而成为在线实时仿真。第二个概念是数字孪生兄弟的分布。实际的单元控制器被编程到一个FPGA中,被测机器、负载和功率变换器在第二个FPGA中实现。两者之间的通信是用模拟线和数字线来处理的,就像控制器连接到真实的测试台一样。第三个概念涉及到两个FPGA程序的组织,基于能量宏观表达法(EMR),它有助于提高透明度,易于实现,并将编码实际测试台副本及其控制器的错误最小化。”
01
—
简介
本研究建立一个完整的测试台的数字孪生模型(DT)。DT和信号HiL之间的主要区别在于,后者通常是在安装实际硬件之前构建的,以便通过强大的仿真来测试一个概念,而DT是在实际测试台存在之后创建的,其数字副本可以独立于实际硬件设施使用。更重要的是,当使用诸如FPGA这样的实时目标来实现这一概念时,模拟和实际测试之间的差距就更大了。在这篇论文中,这些概念和整体的能量表现一起被证明是最好的复杂系统。本研究所考虑的实际试验台的DT考虑了它的所有元件,如控制单元、被测机器及其电子元件、加载机及其附加的可编程电子负载。实际测试台使用一个FPGA作为控制器,用于所有使用的设备(电子逆变器、电子负载和电子旋转变压器)。在设计数字孪生电路时,通常连接到测试台上的FPGA控制器仍然使用相同的代码进行编程,但是将它连接到另一个FPGA而不是连接到测试台上。后者包含实际试验台及其所有组件的完整模型。
两个FPGA使用模拟IO进行通信,用于测量电流和电压,数字IO用于发送PWM信号并获取模拟的旋转变压器数据。实际上,从控制器的角度来看,用它的数字孪生模型替换试验台变得无缝。因此,一般的工作范围是证明实现信号HiL单元作为实际测试台的数字孪生单元的策略。
另一个巨大的优势是,当从数字孪生转换到测试台(来回),只需拔下包含DT的FPGA并连接实际硬件,反之亦然,证明了这种方法相对于简单软件模拟的优势。在本文中,DT的结果只与实际测量进行了比较,目的在于证明DT与实际硬件之间的相似性。为了能够建立这样一个测试台的DT,需要所有硬件组件的正确和精确的识别数据。构建DT所需的数据是使用常见文献中广泛存在的方法确定的。然而,为了证明,没有考虑饱和机饱和或FET驱动器死区时间,这些是未来在这一领域的研究。
02
—
实际测试台
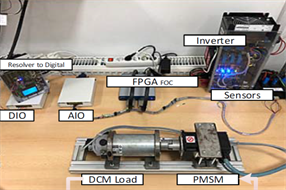
为了建立一个正确和完整的现有试验台的数字孪生模型,有必要知道组成它的所有组件以及用数学解释来描述每个组件所需的所有数据。

图1:实验室测试台
对于永磁同步电动机,建模和控制单元中使用的辨识参数为:定子电阻Rs=0.07?,DQ轴上的电感为Ld=0.0002H和Lq=0.0002H。从力学角度看,惯性为J=0.00332kg·m2,摩擦系数为B=0.00122N·m·s。
03
—
数字孪生体的EMR表示
根据试验台上所有部件的信息,设计出其EMR表示。EMR是一种图形形式,用于在一个完整的系统中组织模型和子系统的控制。在图2中,描述了DT的整个EMR组织。可以观察到,DT被分成两个FPGA。一个处理机械耦合的电机模型,逆变器和负载,而第二个包含完整的控制单元。两个FPGA之间的通信使用模拟和数字IO通道进行处理,以模拟实际测试台。这样,如果控制单元正在控制实际的测试台或其在FPGA上建模的数字孪生体,则它没有信息。
完整的DT是使用一个实时GUI来监控的,实际上这个GUI允许用户施加不同的行为特征,并将模型中的数据流化到数据文件中。
模型中用于表示来自试验台或控制单元的实际组件的每个块都进行了编号,以简化其与以下解释和数学表达式的关系。

图2:DT的EMR表示
直流母线模块(1)实际上是一个常数,它将逆变器的电容电压施加在50V。第二个模块(2)实际上是逆变器的复制品,它基于从控制器接收到的3相PWM信号(m)来产生开关电压。当(m)信号施加时,PWMa、b、c值为0或1。第三个区块(3)是由3相DQ0量直接进行的Park变换。这是基于准确的转子位置(?)可供使用。第四块(4)表示直接以DQ形式详述的电机绕组模型。对于这些计算,必须有关于DQ电感和电机相位电阻的正确信息。机电转换是第五个模块(5),根据定子电流、电机参数和转子速度计算出永磁同步电机转矩和反电动势DQ分量。第六块,对应于由永磁同步电机产生的转矩、DCM的负载转矩、摩擦系数B和两台机器的总惯量J描绘的机械转换。第七块(7)表示DCM产生的转矩和反电动势、电机电流的计算函数、轴速度以及电机的转矩和电压常数,详见表I。DCM的绕组模型在方框8中描述,它是机器参数和机器电源/负载电压的计算函数。为了创建一个电子负载(块9)的副本,该电子负载通常接收外加电流并计算需要提供给负载以达到所需电流的电压,实现了一个PI控制器,该控制器输出所需电压,以减少施加电流和实际DCM电流之间的误差。到目前为止(1-9)详细说明的所有模块都在模拟最佳工作台的FPGA中实现。
这些模块接收或发送到控制单元的信号通过FPGA上可用的模拟和数字端口进行处理。为了模拟附在分解器上的实际电子元件的响应,创建了一个附加块,即分解器1(图2中提到了RES)。它输出轴在数字通道上的位置,然后由控制器转换成实际的角度位置。
在第二个FPGA上,DT和实际测试台的控制单元,块10处理从基准转矩计算负载机的实际电流。为了计算实际速度和参考速度的永磁同步电动机功能的参考转矩,使用11号块,其中包含处理此问题的PI控制器。机电转换在块12中被重用以估计反电动势的DQ分量的值。13号区块处理的测量电流的逆帕克变换确定了整个控制策略所需的DQ值。块14用于计算参考转矩的参考Q电流函数,而参考D电流来自策略块。将后者作为永磁同步电动机的一般控制方法。DQ电压的实际参考值在方框15中计算。测量了两个调节器的反电势DQ值,并进行了计算。DQ参考电压需要使用反向驻车变换转换为三相量。这个问题在16区处理。最后一个模块,17号实际上是PWM发生器。将每个三相电压与特定频率的PWM载波集进行比较。比较的输出是0或1,这些值实际上代表晶体管的状态。这些状态将使用可用的数字信道从控制单元FPGA发送到测试台模拟器FPGA。
一般来说,EMR概念在几篇论文中被详细阐述,通常在Matlab Simulink或LMS Amesim中作为离线仿真和在台风HiL实时环境中实现。为了向前迈进一步,作者在两个FPGA中实现了整个模型,一个处理控制单元,另一个处理完整的测试台模型。2个FPGA之间的通信是使用数字和模拟IO处理的,因为控制单元将连接到实际测试台。一方面,通过这种方法可以得到更真实的分析;另一方面,只需断开FPGA测试台模拟器,将控制器连接到实际硬件上,就可以实现从控制数字孪生到控制实际测试台的过渡。

图3:测试台(top)和控制单元(bottom)的EMR表示的FPGA实现
在图3-top中,描述了作为数字孪生体的实际测试台的EMR。对于EMR概念中创建的每个块,创建一个子VI。为了创造一个更灵活的环境,除了每个模块的正常输入/输出信号外,还增加了几个额外的输入/输出信号,以确保模块内的数学模型中所需的数量不同,例如机器参数、积分器的采样时间和调节器的增益。在FPGA编程中,当一个信号从输出端向后发送到输入端时,在FPGA编程中这些连接是必需的。但是,这些不会改变系统的行为,只会确保在模型内部以正确的方式操作适当的数据。在图3的顶部和底部,数字输出和输入端口在控制和测试台模拟器回路中可见。然而,模拟输入/输出端口在图2中不可见,因为它们是在单独的回路中实现的,但是三相电流、机器速度和位置以及DCM的电流和电压是通过这些通信线路发送/接收的。永磁同步电机模型(图3-top)触发控制FPGA的时钟,如图3-top的下部所示。FPGA以5MHz的频率工作,数据传输以相同的速度进行。然而,ADC IOs的工作频率约为1MHz,取决于参与项目的人数。虽然数据不会从IOs刷新,但FPGA自然会回收在输入端口上读取的最后一个数据。保证了在同一时间段内采集到的数据流和数据流中的数据流是可靠的。
04
—
对比分析
如前所述,为了对实际测量结果与从DT获得的结果进行正确的比较测试,在两种分析条件下,对永磁同步电机施加相同的速度基准,并对DCM施加相同的负载转矩。更重要的是,为了确保正确的数据采集,所有的分析都对数据的采样率和数据流到TDMS文件的采样速度施加了相同的要求。主要的兴趣是比较DQ电流、转速和产生的转矩、最终返回效率的电功率和机械功率以及在这两种情况下DCM的电压和电流。必须指出的是,红色曲线表示与DT相关的量,蓝色曲线表示在试验台上测得的量,绿色曲线表示参考值。

图4:PMSM的参考速度,模拟速度和测量速度
在图4中,描述了永磁同步电动机的参考速度、模拟速度和测量速度。结果在20分钟的时间段内。正如可以观察到的,DT和试验台测量值都与施加的参考值非常一致。

图5:PMSM的参考扭矩,模拟扭矩和估算扭矩
在图5中,描述了基准、基于电流的估计和模拟的转矩特性。这里首先要提到的是,测量的和模拟的转矩非常一致,叠加非常紧密。但是,这些值略大于参考值。这是正常的,因为为了使永磁同步电动机确保产生的转矩满足参考值,它还必须产生更大的转矩,以克服两台机器轴承中存在的摩擦。